
从建模到控制,如何让人形机器人“走稳每一步”?
发布日期:2025-08-14 浏览次数:4
随着科技进步,机器人应用正从工业领域拓展至人形机器人领域。凭借其形态优势,人形机器人有望覆盖人类活动的广泛场景,潜力巨大。
然而,相比成熟的工业机器人,人形机器人在工业制造与物流等领域的规模化应用仍处于起步阶段,面临成本、技术及市场接受度等多重挑战。尽管其在特定场景下展现出了更强的适应性与灵活性,但其控制理论和软硬件系统复杂度极高,长期以来发展受限。
深谷智脑赋能人形机器人研究
针对这些挑战,研究团队聚焦人形机器人稳定性及步态控制研究,基于中科深谷CSPACE开源智脑系统进行开发,采用基于模型的控制方法,在Matlab与Mujoco联合仿真平台上开发了控制算法,并最终部署到宇树H1样机平台进行实物验证。核心目标为:一是在仿真环境和真实样机上实现平稳的站立与行走功能;二是赋予机器人应对环境变化的抗干扰能力。研究系统性地涵盖了步态规划、运动学与动力学建模求解、稳定性判据建立以及综合运动控制策略的设计,最终实现了人形机器人的稳定行走。

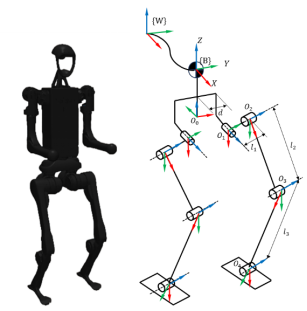
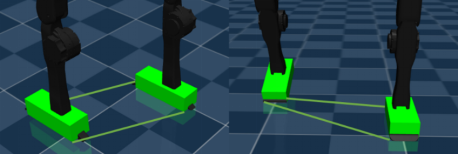
图:人形机器人实现稳定行走
研究内容及过程
研究内容具体包含以下几个方面:首先,针对人形机器人下肢进行了运动学的分析,逐层递进地建立了机器人的运动学模型。基于多体系统运动学建模理论,构建了完整的人形机器人腿部运动学分析框架:
1)针对浮动基特性,采用齐次变换矩阵建立了世界坐标系与本体坐标系间的运动学耦合关系,推导出考虑基座位姿的足端空间位置统一表达式;
2)基于微分运动学原理,通过对正运动学方程求导获得关节空间与操作空间的速度雅可比矩阵,并基于虚功原理建立足端力至关节力矩的静力学映射模型;
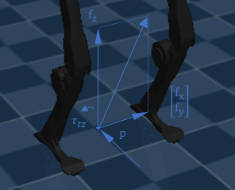
3)结合接触动力学理论,建立包含法向接触力Hertz模型与切向摩擦约束的足地交互方程,推导出满足摩擦锥约束的接触力可行域。通过MATLAB/Simulink搭建的多体动力学联合仿真平台,实现了从运动学建模到接触力分析的闭环验证,为后续腿部柔顺控制与力优化算法研究奠定了理论基础。
图:机器人运动学建模
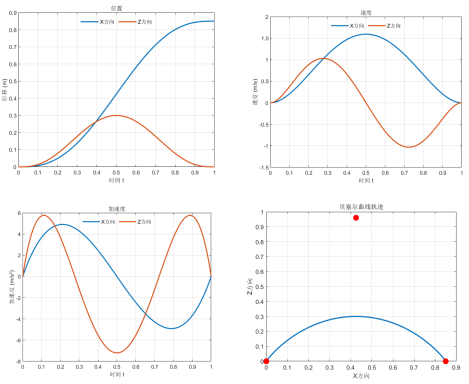
随后,研究探究了人形机器人的稳定性判据和不同方法的步态规划方式,介绍了零力矩点(ZMP)理论,提出了六阶贝塞尔曲线和线性倒立摆的步行规划方法。为了与实际情况更加契合,对这些方法进行了不同程度的简化,以求实现更好的效果,最终确定了基于线性倒立摆模型来估计机身速度预测未来的落脚点位置,应用贝塞尔曲线的方法来生成相位可调的z方向轨迹。这些研究同样还为后续的全身控制算法提供了基础。
图:足地接触动力学模型
图:贝塞尔曲线生成的足端轨迹
行走动力学控制策略
在行走动力学控制策略方面,研究借鉴了四足机器人的经验,初步尝试了虚拟模型控制(VMC)。然而,发现VMC未充分考虑足底力,导致自主行走能力不足且身体姿态控制效果不佳,但其思路仍有启发价值。在此基础上,研究引入了模型预测控制(MPC)策略。MPC控制策略在人形机器人上有两种控制思路,一种是基于ZMP稳定性判据的质心轨迹优化控制,另一种是基于足底力优化的支撑相控制和摆动相PD跟踪的控制。经过仿真验证,第一种方法刚度太大,应对复杂路面和扰动的能力较差,故本研究选择了第二种控制方法。为进一步提升性能,研究还结合鲁棒控制方法对摆动腿的PD控制器进行了优化,显著增强了控制系统的稳健性。
实验验证
最后,研究在宇树H1样机平台上进行了全面的实验验证。这包括采用PVT(位置-速度-时间)控制实现的静态稳定实验,以及应用MPC控制实现的动态行走实验。同时,在单关节电机上专门测试验证了所设计的鲁棒控制器的优异性能。通过将详尽的仿真数据与实物实验结果进行严格对照,最终有力地证实:所提出的综合控制策略不仅能在仿真环境中有效实现稳定行走,在真实的人形机器人样机上也展现出了卓越的实际性能。
图:机器人动态行走实验
该研究成功开发并验证了一套面向人形机器人稳定行走的综合控制方案,在宇树 H1 平台上实现了从精确建模、智能步态规划到鲁棒动态控制的有效闭环,显著提升了行走稳定性和抗干扰能力,为实用化人形机器人的运动控制提供了重要的技术支撑和实践范例,为其未来在工业、服务乃至家庭等广阔场景的深度应用奠定了坚实的控制基础。
深谷开源智脑系统高效赋能科学研究
中科深谷CSPACE异构协同智脑系统构架采取大模型、多模态感知、实时决策、建模与仿真和物理执行等,可以让智能体与物理环境动态实时信息交互,实现自主学习、决策与行动。系统以模块化、开放性为特点,用于解决智能体对环境和任务的建模、仿真、自主决策、自主控制过程,除了能控制单个智能体对象完成作业任务外,还具备群体智能控制能力,可以让更多的智能体融合到一起,开展分工协作任务。
CSPACE智脑系统可为科研探索提供高效、可靠且通用便捷的综合性解决方案,有效助力前沿技术研究与创新突破。欢迎咨询!