
仓储机器人如何实现最优路径与精准跟踪,丝滑“走位”?
发布日期:2025-08-07 浏览次数:28
当前,我国仓储物流行业智能化升级加速,传统移动机器人已难以胜任现代智能仓库的复杂任务。四轮驱动四轮转向移动机器人凭借其车轮转向角与驱动力矩的独立控制能力,展现出显著优势。然而,这种多输入冗余特性也引发了模型强耦合与动态约束复杂化等挑战。
针对上述挑战,研究团队依托中科深谷CSPAC开源智脑系统,基于深谷开源四驱四转移动作业机器人开展研究,针对高密度仓储环境下物流机器人作业效率提升需求,提出基于四轮驱动四轮转向(4WD-4WS)架构的智能控制系统解决方案。通过构建多层级的动态路径规划体系与高精度轨迹跟踪控制系统,实现仓储机器人在复杂作业场景下的自主导航及厘米级定位精度控制。
移动机器人系统设计
该研究首先提出了一种创新的四轮驱动四轮转向架构。该架构赋予了机器人卓越的机动性和承载能力,同时通过紧凑型机械结构设计,确保了其在狭窄通道内的灵活穿行。
机械结构采用模块化设计理念,支持快速拆装与功能模块集成,为后续的维护与升级提供了极大便利。精心选型的轮毂电机与转向电机,配合高效的电源管理系统,为机器人提供了稳定可靠的动力支持。

图:移动机器人实物
运动学与动力学建模
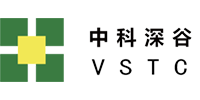
为使规划路径既符合机器人的动力学约束,又能实现避障,需建立精确的运动学模型并基于此进行动力学分析。该研究针对四轮独立驱动且四轮独立转向的移动机器人,提出一种简化的运动学建模方法,引入双阿克曼转向的方法,使其适应于四轮协同转向模型,以实现平滑的轨迹跟踪控制。在此基础上进一步构建动力学模型,对动力学模型进行简化假设,采用单轨模型对机器人进行描述,并分析了轮胎模型,为之后的横向稳定性控制和移动机器人动态性能优化奠定基础。
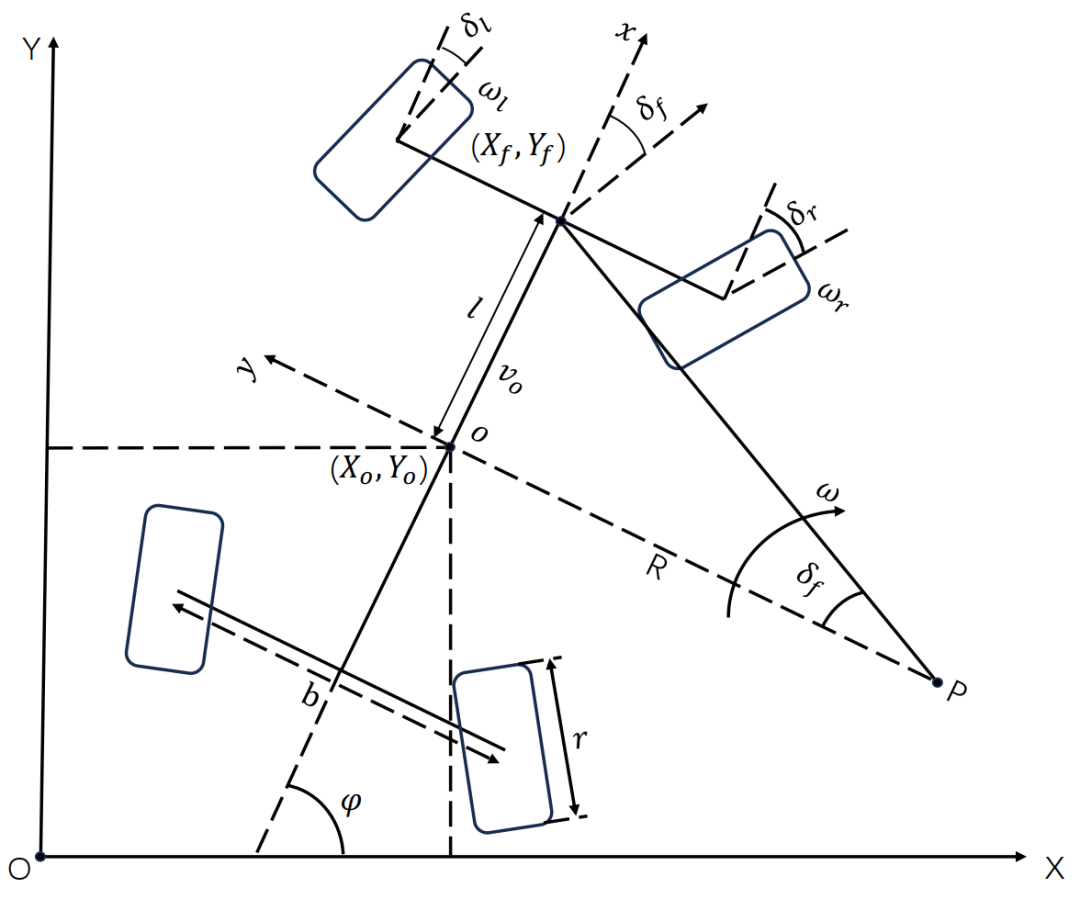
图:移动机器人转向模型
改进JPS算法的路径规划优化
全局路径规划是移动机器人自主导航的认知基础和决策核心,其本质在于通过对环境信息的先验理解与解析,为机器人构建从起点到目标点的最优运动轨迹,在复杂动态场景中,机器人若仅依赖实时传感器数据进行局部避障,极易因环境信息碎片化陷入局部最优陷阱,甚至因缺乏对整体任务空间的认知而完全迷失方向。
在该研究中,全局路径规划通过融合地图先验与任务约束,将离散的障碍物分布转化为连续的可通行区域网络,进而利用图搜索算法或采样优化方法生成全局最优或次优的通行序列,为后续轨迹跟踪模块提供全局路径。
路径规划方法采用JPS算法,并分析传统JPS算法的优势和缺点,针对JPS算法在搜索过程中搜索节点过多以及存在冗余节点问题,提出改进的JPS算法——通过引入Octile距离作为启发函数,并结合角度引导因子,有效解决了JPS算法在搜索过程中遍历节点过多的问题。同时,提出的路径修剪算法进一步剔除了冗余节点,显著提升了路径的可靠性和生成效率。Matlab仿真结果验证了改进算法在多种复杂环境下的优越性能。
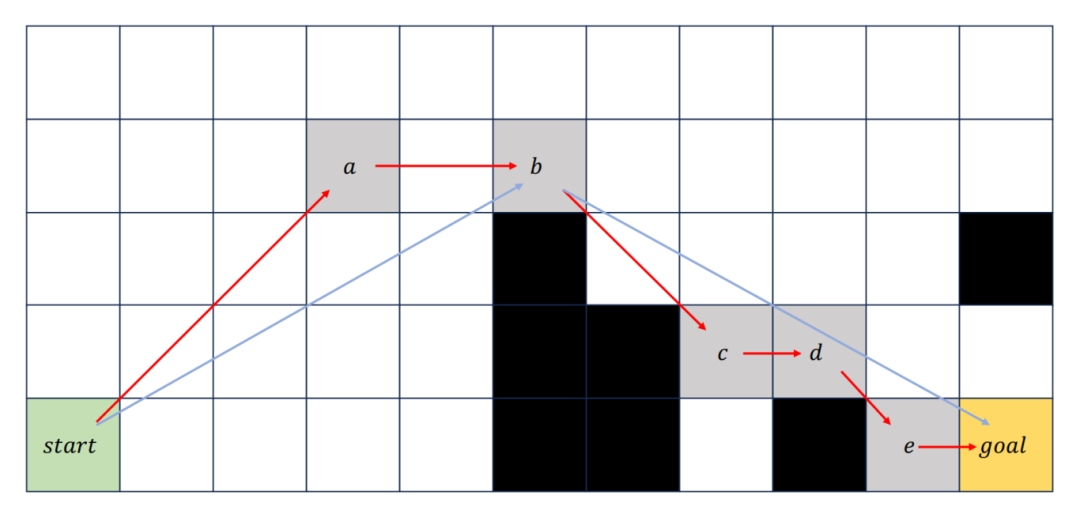
图:改进JPS算法规划方法
图:仿真结果对比
移动机器人轨迹跟踪控制方法
轨迹跟踪控制作为导航流程的最终执行环节,其核心目标在于实现机器人对预设轨迹的精确跟随与运动连贯性。该研究以经典模型预测控制框架为基准,创新性地融合轨迹离散化线性处理技术,通过构建包含运动学预测模型、多维度优化函数及动态约束条件的控制体系。针对传统方法在复杂路径跟踪场景中存在的运动平顺性缺陷,提出融合模糊逻辑自适应机制的混合控制策略,核心创新在于建立基于横向偏移与航向偏差的动态权重调控系统,并设计协同优化算法平衡跟踪精度与运动连续性。
通过仿真验证其在典型环形路径以及经典双移线路径的可靠性,在大曲率环境以及曲率高度变化环境对比所提出改进MPC与原始MPC的优劣,结果表明改进型MPC跟踪效果显著优于原始MPC。
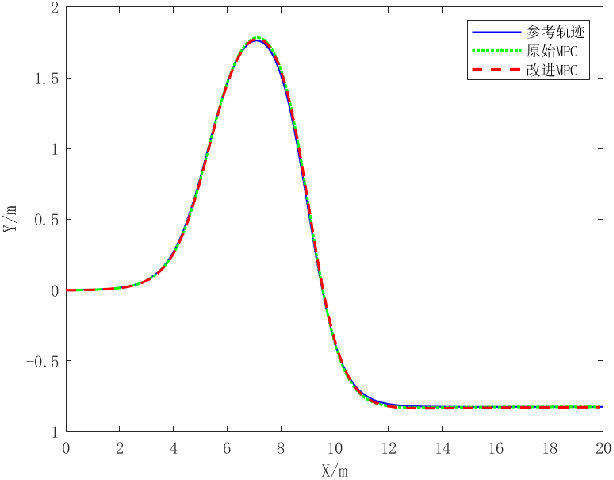
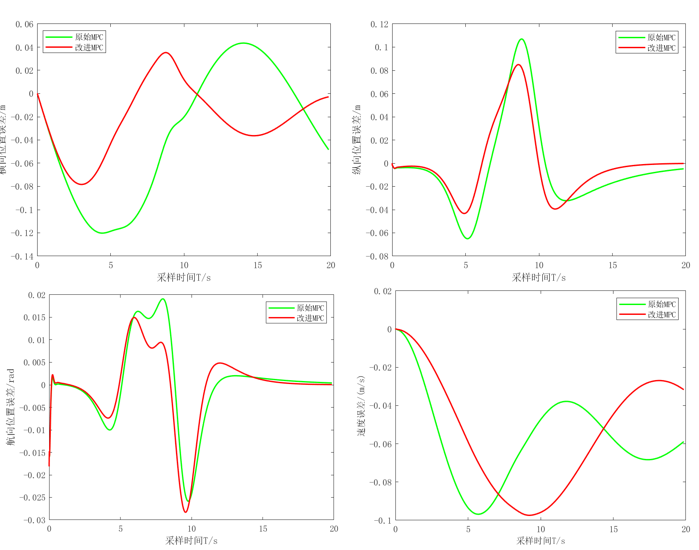
图:跟踪控制器仿真验证
实验验证阶段选取经典双移线路径作为基准测试场景,在大曲率工况下进行多维度对比分析,结果表明改进型MPC相较于原始MPC展现出显著优势。
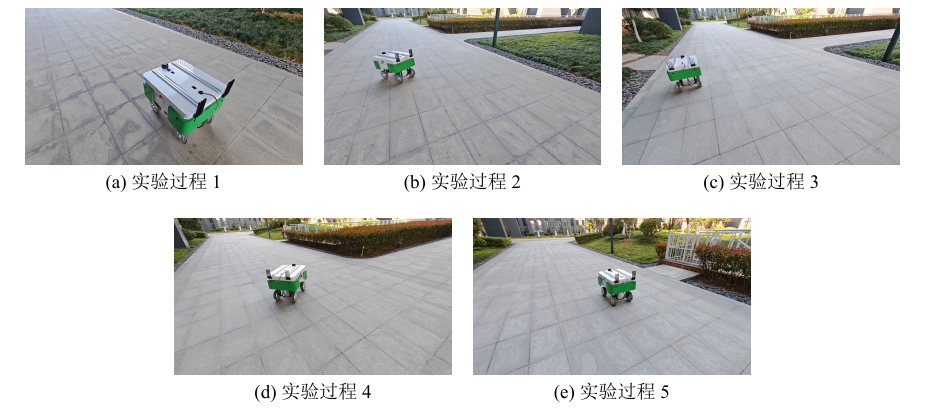
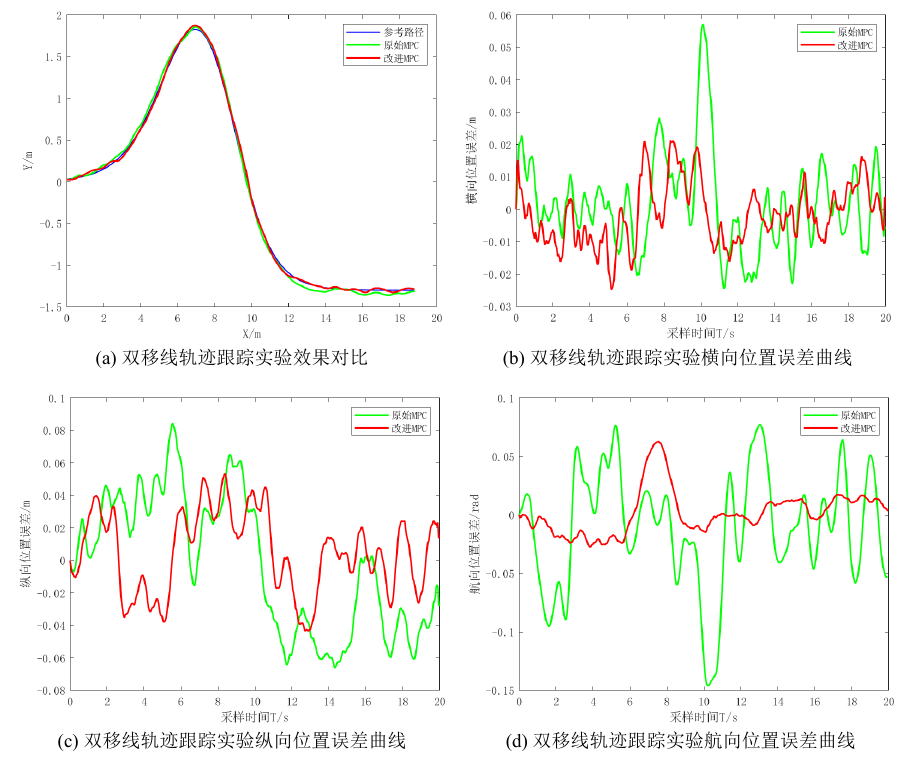
图:实验过程及验证效果
该研究成果为四轮驱动四轮转向移动机器人的实际应用提供了关键支撑,可以让该类机器人在现代智能仓库的复杂场景中能够更加智能、高效地执行任务。随着技术的不断突破,四轮驱动四轮转向移动机器人将在智慧物流乃至更多领域发挥重要作用,为仓储运作和供应链管理等带来显著效能提升。
深谷开源智脑系统高效赋能科学研究
中科深谷CSPACE异构协同智脑系统构架采取大模型、多模态感知、实时决策、建模与仿真和物理执行等,可以让智能体与物理环境动态实时信息交互,实现自主学习、决策与行动。系统以模块化、开放性为特点,用于解决智能体对环境和任务的建模、仿真、自主决策、自主控制过程,除了能控制单个智能体对象完成作业任务外,还具备群体智能控制能力,可以让更多的智能体融合到一起,开展分工协作任务。
CSPACE智脑系统可为科研探索提供高效、可靠且通用便捷的综合性解决方案,有效助力前沿技术研究与创新突破。欢迎咨询!


