
创新实践中心建设方案|基于车路协同无人智能控制系统
发布日期:2024-01-04 浏览次数:1793
PART 01 方案介绍
车路协同无人智能控制系统是利用新一代信息与通信技术,将人、车、路、云连为一体,进行融合感知、决策与控制,可实现车辆行驶和交通运行安全、效率等性能综合提升的一种信息物理系统。该系统可以用于智能制造工程专业、人工智能专业、智能车辆工程专业实践教学,可以用于智能系统设计与搭建、集群控制编队、传感器网络、导航与运动控制系统、目标搜索与跟踪、数据融合、并行计算、多智能体协同控制、网络资源分配等方向科研及应用。
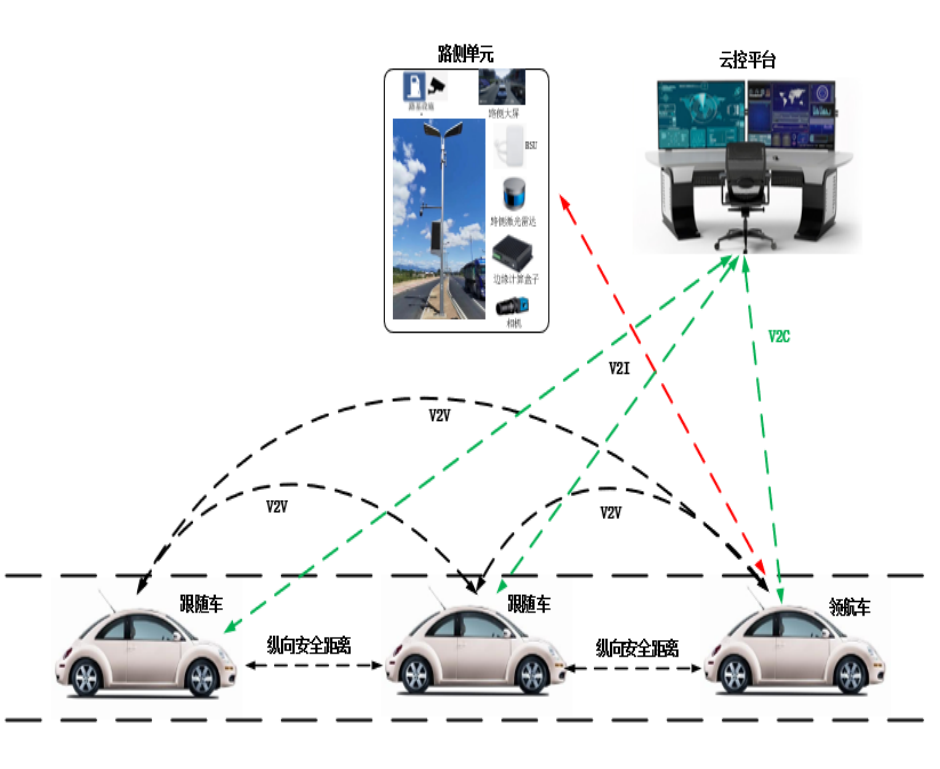
系统主要由车载端、路侧端及云控端组成。系统架构示意图如下图所示。
PART 02 系统组成及功能
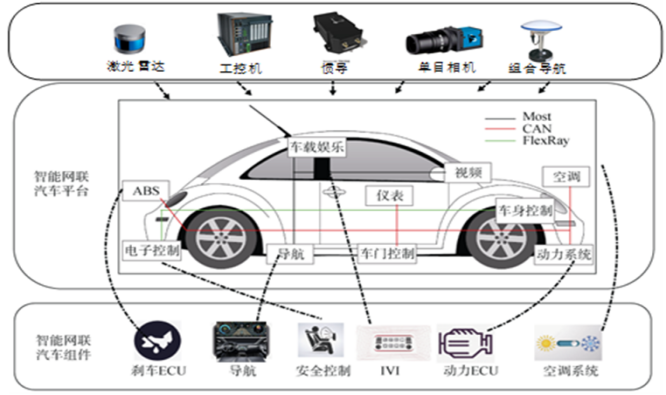
(1)车载端车载端由感知层、决策层、执行层三部分组成,其中感知层是利用各传感器对车辆所处的周边环境进行数据采集,获取道路环境信息并进行处理,得到车辆和周围障碍物所处位置信息及周围车辆等障碍物距离、速度等信息,为各种控制决策提供信息依据。能够实现自动驾驶功能,包括路径规划、轨迹跟踪、主动避障、自主停障、主动转向、紧急制动、人机交互、毫米波雷达目标检测、激光雷达建图等一系列功能。
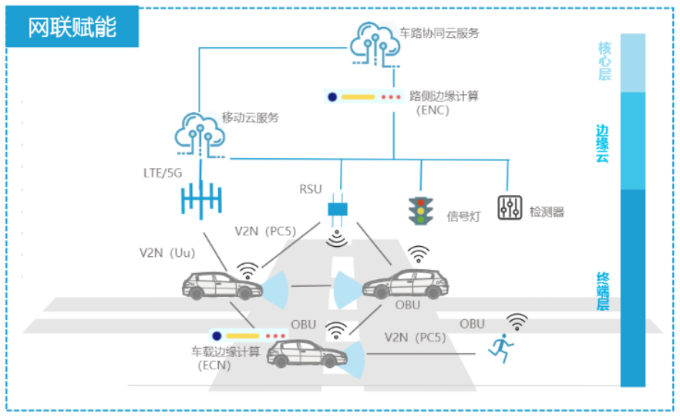
(2)路侧单元路侧单元端由智慧路灯杆、边缘计算系统、相机、激光雷达、红绿灯、组合导航、基站等组成。内置存储高精地图,支持对车辆的精准定位与监测;支持用户对路侧单元进行安装、标定、调试。

(3)云控端云控端是以路侧系统和车载系统为基础进行构建,通过无线通讯设备实现车路的信息交互和共享。其主要工作流程为:由路侧系统的传感器采集交通流、道路路面状况和一些异常事件等信息,并由路侧控制单元进行处理,然后传向路侧无线通讯设备,路侧无线通信设备进行广播,区域范围内的路侧单元同步进行数据接收,同时,路侧无线通讯设备传递到区域范围内的车载无线通讯设备,与车辆采集的信息进行交互和融合,最后反馈给驾驶员,由驾驶员对当前的交通环境进行判断,做出相应的反应动作。

PART 03 可支持实践内容

可开发实验
① 复杂路况环境感知;
② 环境数据采集与大数据分析;
③ 人车路模型建立与分析;
④ 基于综合感知能力的速度方向规划;
⑤ 基于人工智能技术的设备状态监控与分析;
⑥ 全局及局部路径规划算法;
⑦ 基于SLAM算法实现高精度定位;
⑧ 基于Dijkstra算法、A*算法实现平台运动规划;
⑨ 基于深度学习技术的最优运动路径规划;
⑩ 非预知状况下判断与决策实践。


