
中科深谷新产品发布:智能轻量型机械臂平台
发布日期:2024-12-31 浏览次数:1359
具身智能机械臂作为智能机器人领域的一个重要分支,正在迅速发展并展现出巨大潜力。它们通过集成先进的感知系统、决策规划、控制技术以及多模态交互能力,能够更好地理解和互动复杂的环境,执行各种任务。
中科深谷最新推出智能轻量型机械臂平台,专为科研教育、创科应⽤等场景开发的机械臂平台。该机械臂是一款具身智能和轻量化场景设计的准工业级机械臂。全部采用谐波减速箱驱动一体式电机,并支持掉电自锁功能,提供充足的安全保护。该系列分为两种类型,D 系列待机时为折叠状态,适合桌面或平台使用;H 系列待机时为垂直状态,适合仿人形机器人使用。

01 轻量化设计,车载全无压力
智能轻量型机械臂采用独特轻量化设计,是高集成度六自由度智能机械臂,拥有高负载自重比,同时兼具安全性、可靠性、易用性和便携性。可以搭载于可以搭载于四轮四转移动机器人、轮式机器人、轮足式机器人、 四足机器人等各类常见的移动机器人平台,用于完成不同场景下的移动操作任务。
02 开放可拓展,探索无限可能
智能轻型机械臂支持多种移动平台、处理器、传感器和执行器的融合应用,用户可以根据需求自由组合与搭配。提供 ROS/ROS2, Python,Web API 等 API 调用接口及 C++开发套件, 覆盖机器人应用开发的全流程。可以基于机械臂轻松进行二次开发。
MBD开发方式
采用MBD进行机械臂开发设计,特色如下:

01 将仿真建模与实际研发产品结合,引入高可靠性的实时软硬件环境做技术保障。
02 从需求捕获到设计、实现和测试,系统模型开发和测试始终占据开发流程的核心。
03 追求持续不断的创新,将客户所追求的前沿创新技术与安全、可靠的核心功能有机结合。
03 产品配置
一、机械臂本体

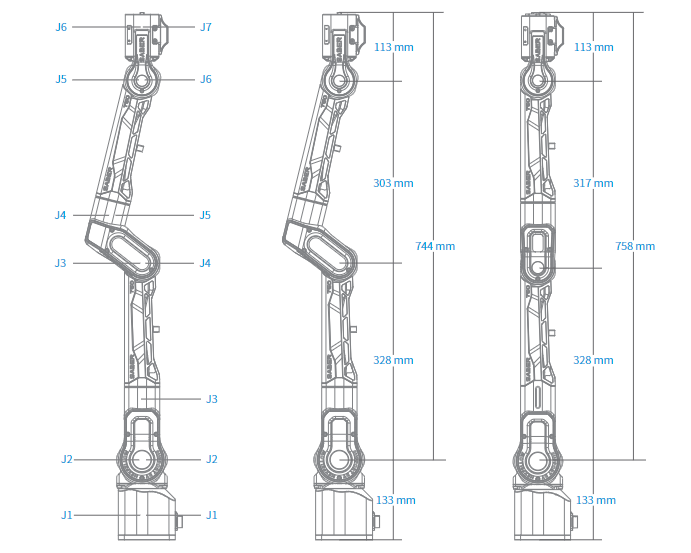
尺寸&工作范围
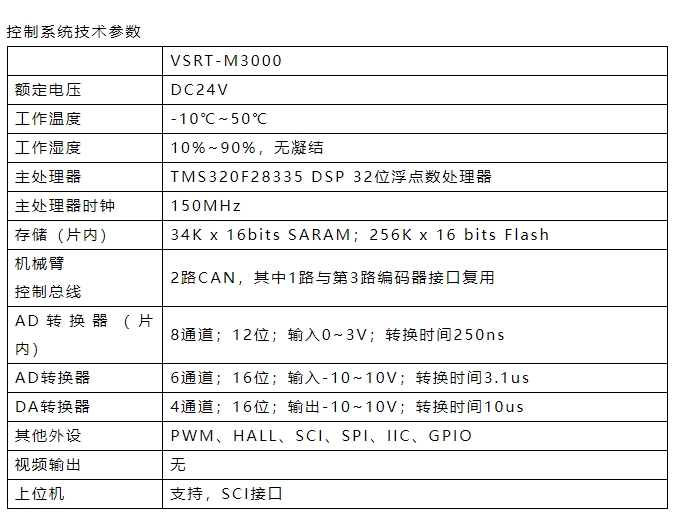
二、机械臂控制系统
CSPACE实时仿真控制系统(型号:VSRT-M3000)是基于TMS320F28335 DSP和MATLAB/Simulink开发。拥有AD、DA、IO、Encoder、PWM、CAN、SPI等丰富的硬件外设接口,以及一套功能强大的监控软件。结合计算机仿真和嵌入式实时控制技术,能实现硬件在回路(HIL)和快速控制原型(RCP)设计的功能,也是基于模型设计(MBD:Model-Based Design)典型的产品。
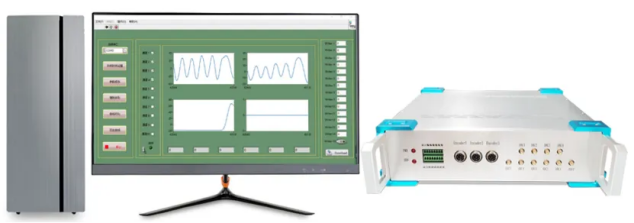
CSPACE控制器
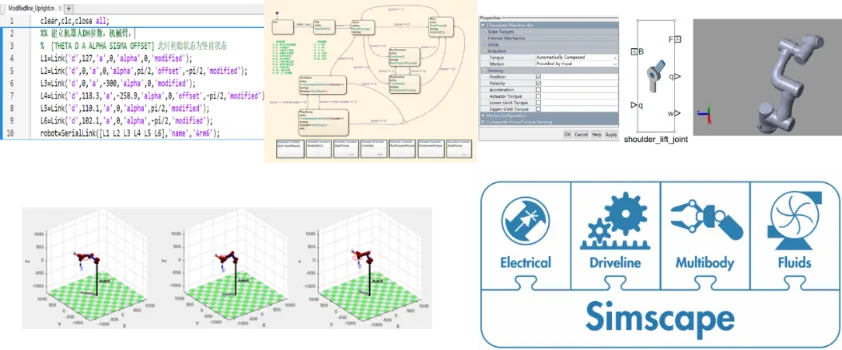
MATLAB/Simulink 2020b,搭载机器人工具箱Robotic Toolbook for Matlab。
上位机
友好的交互界面,开放的通讯协议,丰富的功能指令模块,可自定义数据图形化显示、数据保存、在线调参。

04 平台技术实验具体介绍
以下是本平台提供的实验列表,所有实验均基于Matlab/Simulink软件编写,其源代码完全开放,可自由修改。
- 上一篇:中科深谷新产品发布:开源乒乓球机器人
- 下一篇:中科深谷新品发布:智能墙体检测机器人


