
多智能体协同控制平台——在编队控制技术领域的优势和应用
发布日期:2023-12-14 浏览次数:2569
随着工业技术的发展,多智能体协同控制平台目前已在工业操作、巡逻侦察、灾情救援、环境勘探、智能物流、智能农业等方面有了长足的发展。智能体(Agent)的概念为无人车、无人机、无人潜艇等自主移动平台建立了统一的研究体系。多智能体系统的协同控制是大规模机器人系统实现实际任务与操作的理论基础。
PART 01 多智能体系统的定义、研究内容、技术原理
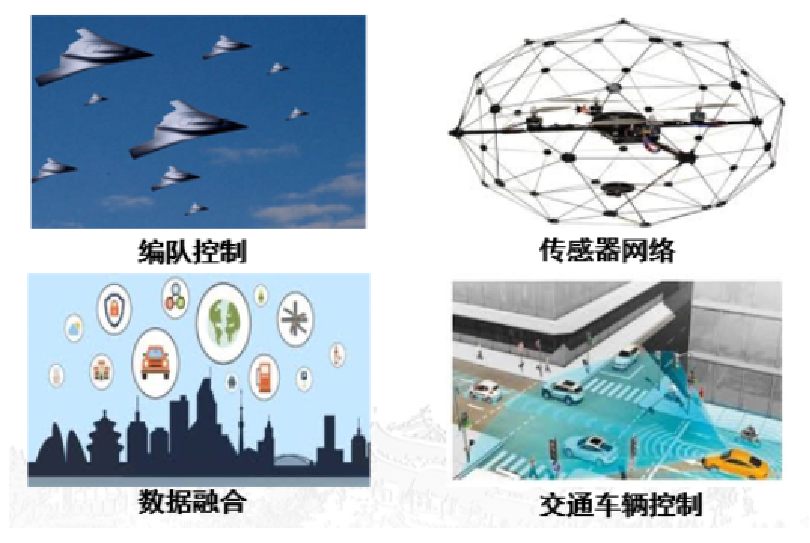
多智能体系统是由多个可计算的智能体组成的集合, 其中每个智能体是一个物理的或抽象的实体,能作用于自身和环境, 并与其它智能体通讯。
智能体与环境交互
多智能体间通信
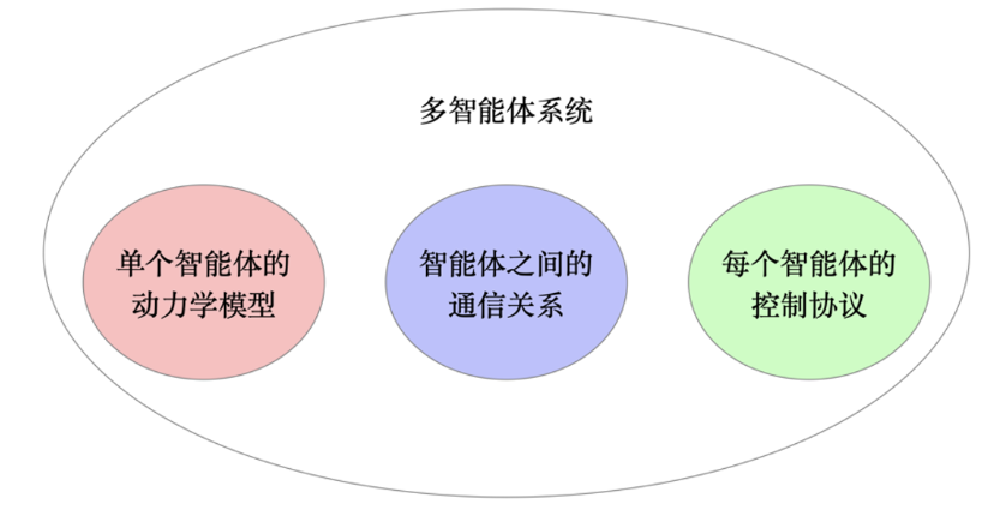
多智能体系统的研究内容主要包含如图所示的三部分: 单个智能体的动力学模型、 智能体之间的通信关系、 每个智能体的控制协议。
多智能体系统的技术原理
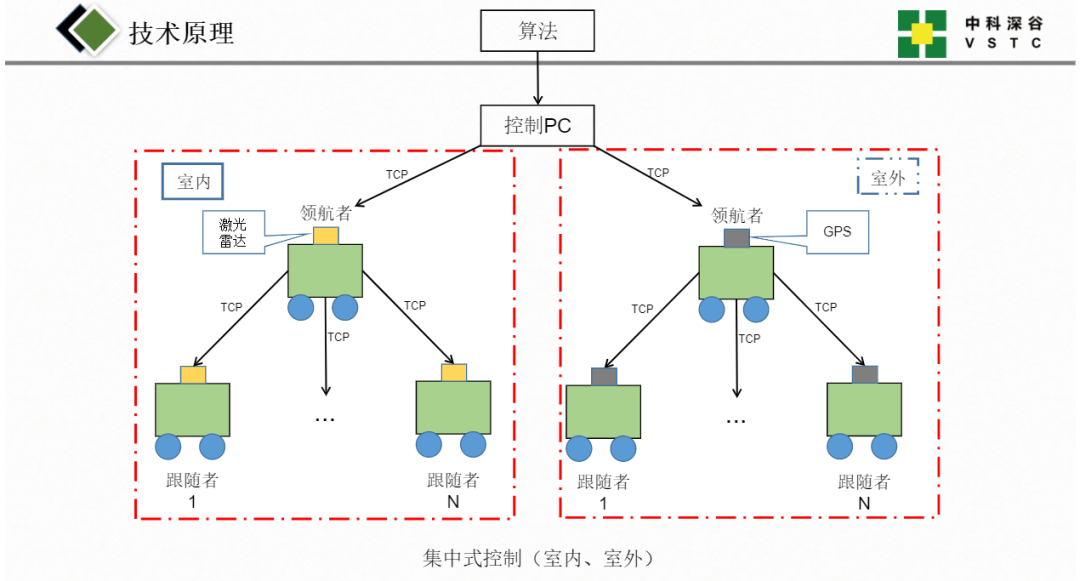
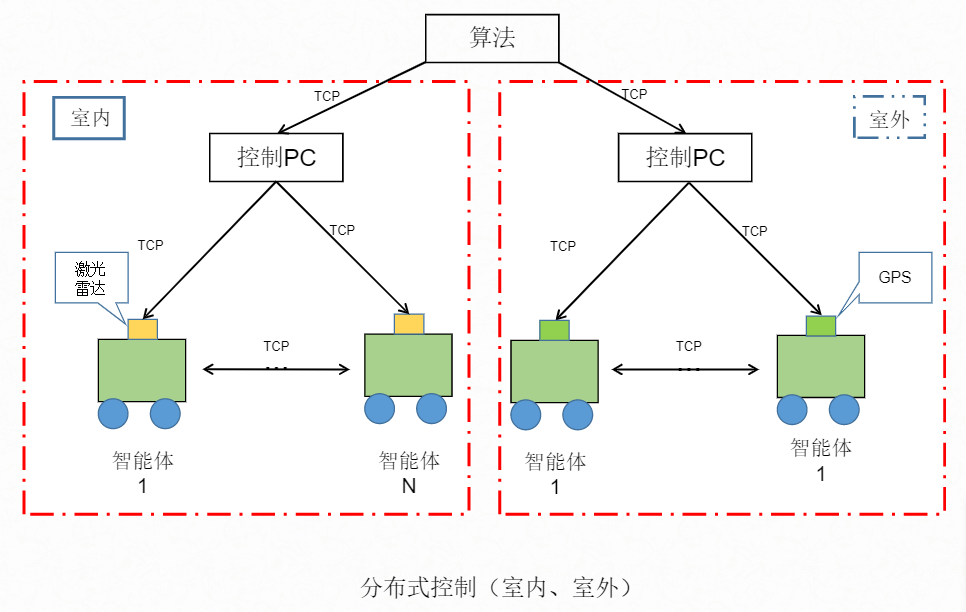
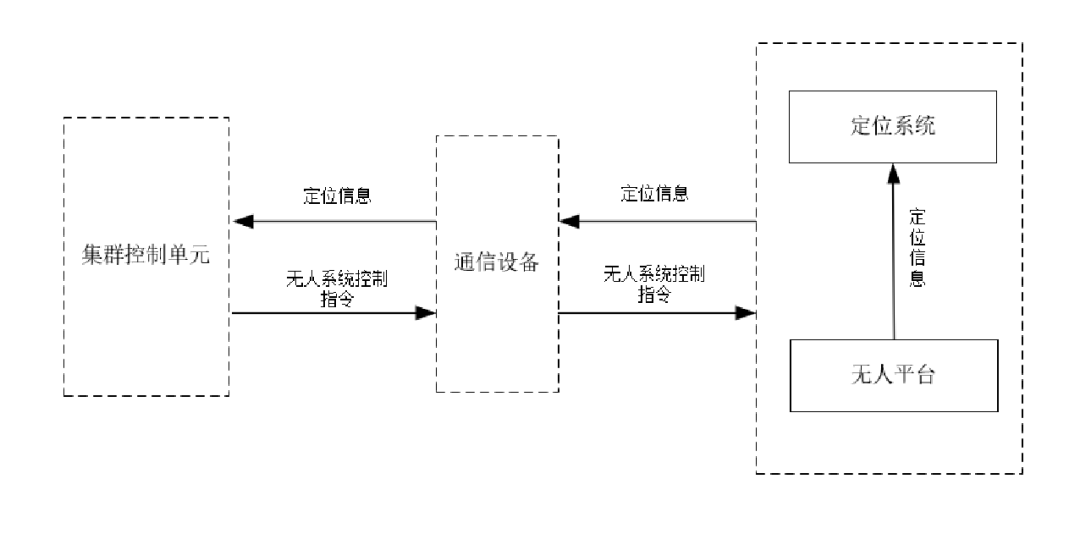
总体设计框架图
PART 02 多智能体系统的相关算法
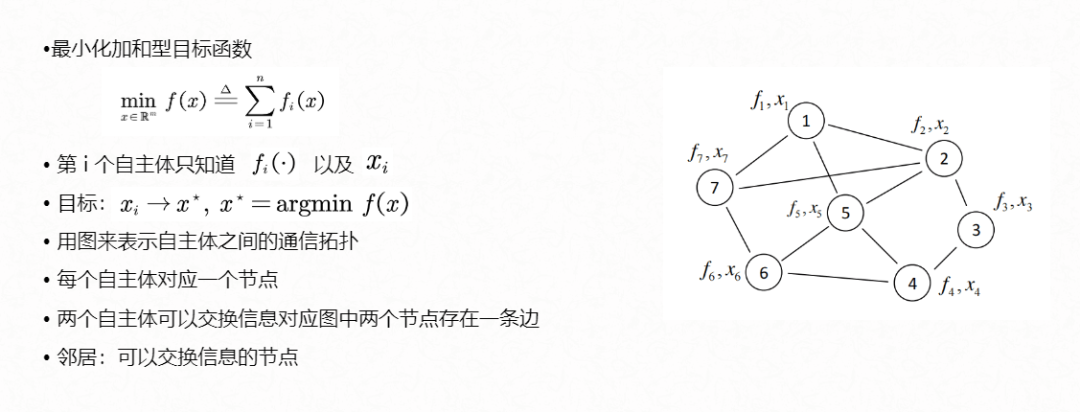
1、分布式数学模型
2、通信拓扑图
为了实现成功的协调,智能体需要关于环境对象对自身和其他智能体的关系的信息。而通信拓扑图则为这个问题提供了方法,在多智能体网络系统的分析和综合中扮演重要角色,能够让我们集中研究拓扑结构内部连接所起到的作用。
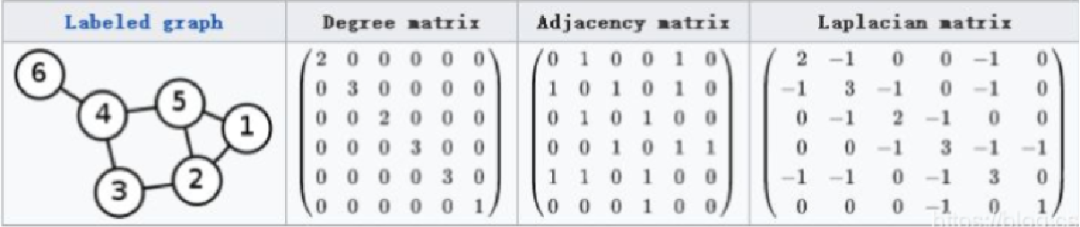
图本质上是一个理论对象的集合,但是,它可以方便地以图形表示。图G=(V,E)由“点”(如顶点vi——每个顶点就相当于一个智能体)以及点之间的线构成。其Laplacian矩阵定义为L=D-A,其中L是Laplacian矩阵,D是顶点的度矩阵,A是图的邻接矩阵。
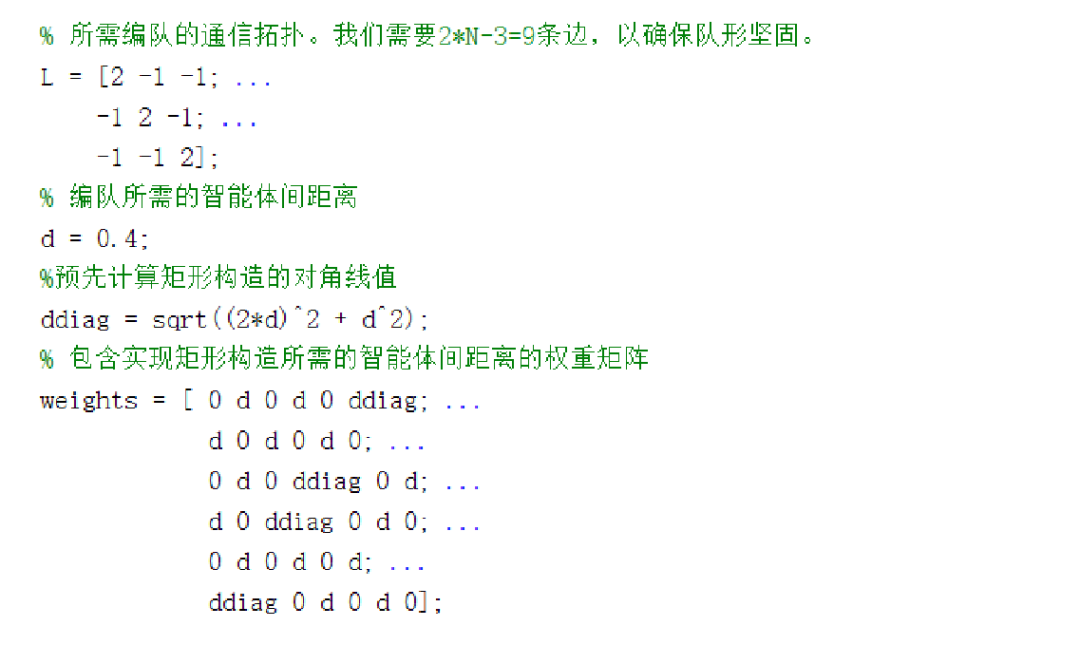
基于MATLAB实现的多智能体通信拓扑图
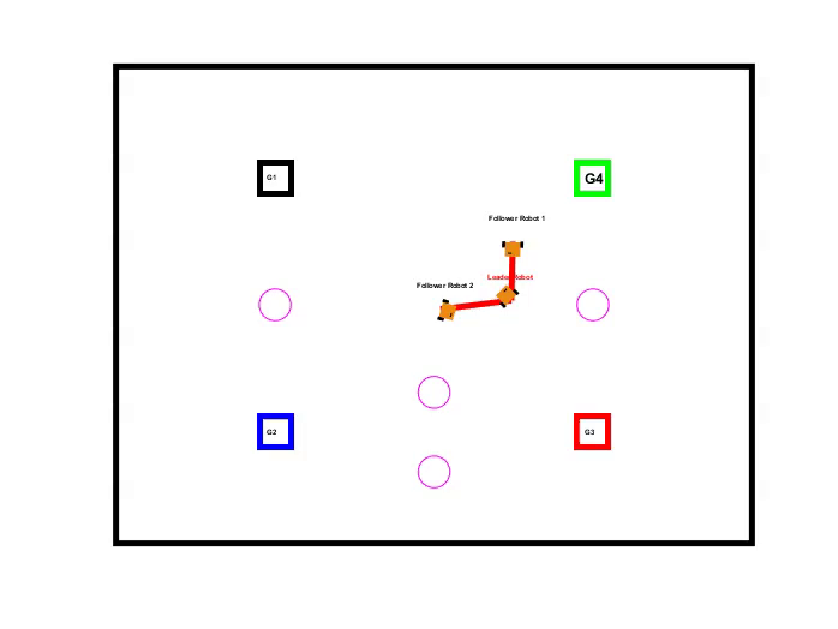
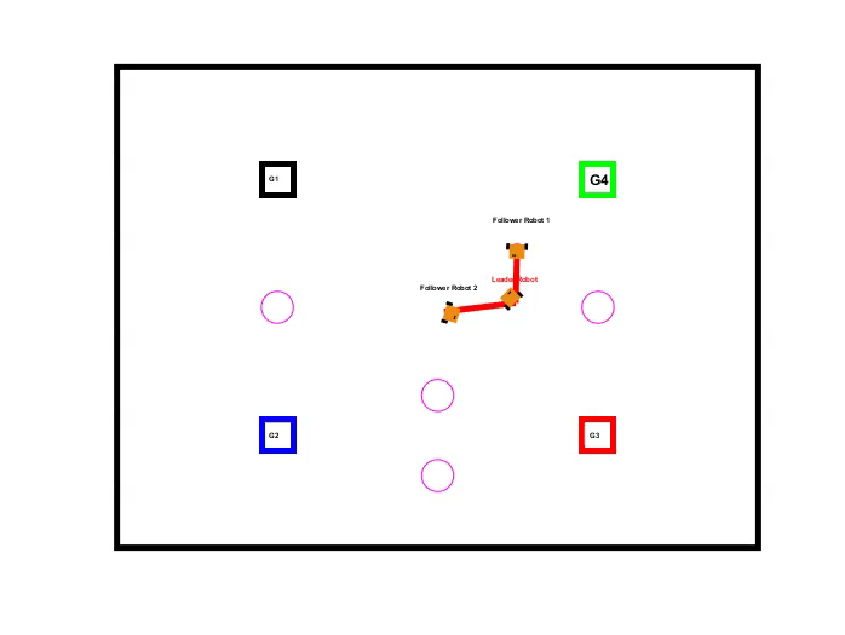
3、编队控制算法(Leader-Follower)
Leader-Follower基本思想是在编队过程中将某一个移动机器人作为队伍的领导者,剩余的机器人作为跟随者,在移动过程中领导者位于队伍的最前方引领队伍,同时给跟随者发送自身的速度位置信息,跟随者根据领航者和其余跟随者发送的信息来决定自己的位置和速度,并发布实时的速度位置信息。
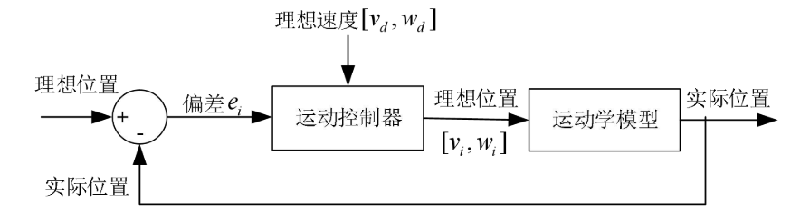 Leader-Follower控制器
Leader-Follower控制器
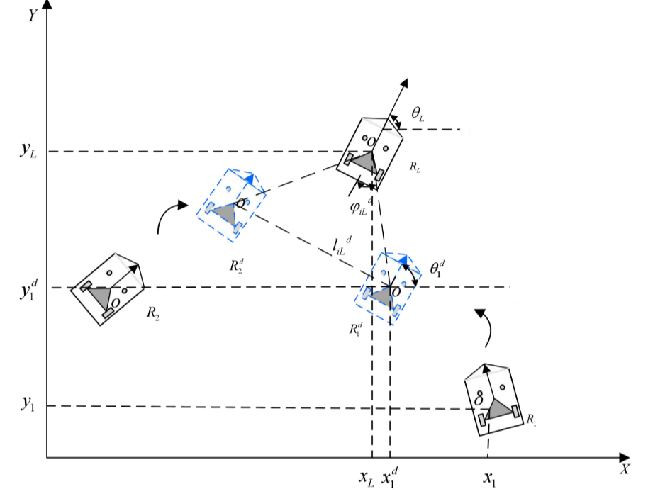 Leader-Follower示意图
Leader-Follower示意图
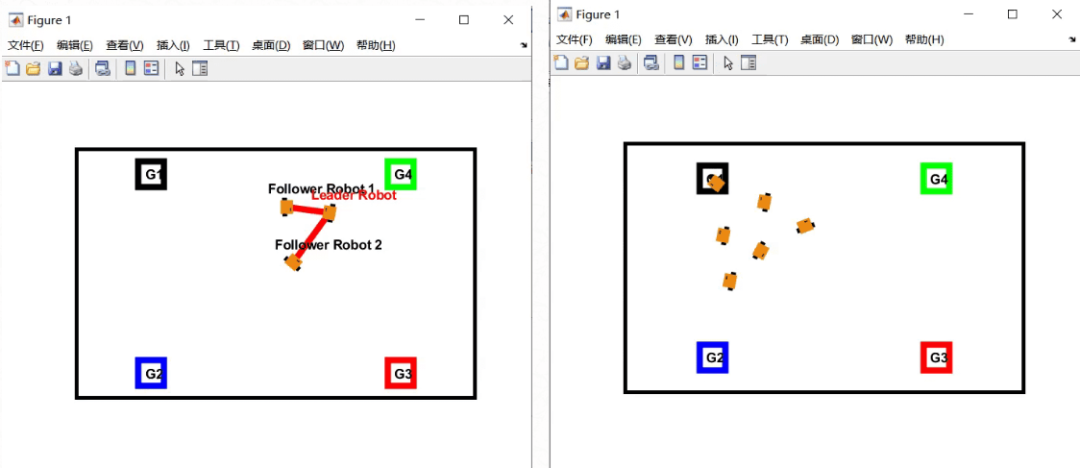
智能体之间的通信拓扑图是通过图论中的Laplacian matrix实现的,并通过改变Laplacian matrix来形成不同的编队队形。除了以上两种队形,可以自由更改智能体数量和Laplacian matrix形成不同队形。也可以增加权重矩阵来指定不同智能体之间所要保持的距离。
优势:原理简单、易于实现
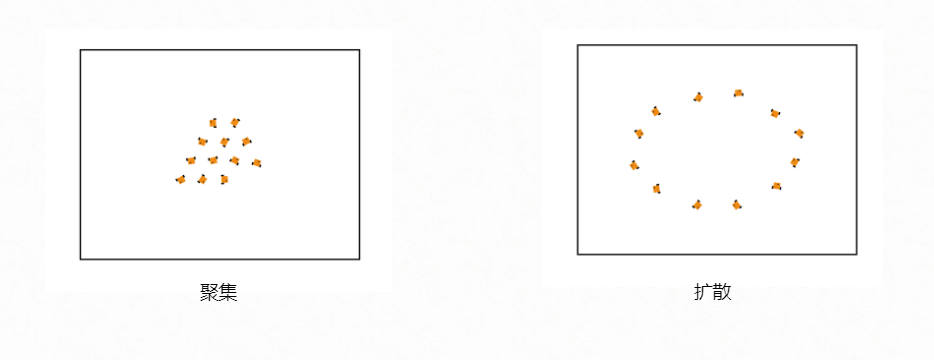
4、聚集扩散算法
该算法的功能是模拟生物群体聚集扩散状态,使编队中的智能体不断聚集扩散,并保证不能让智能体之间发生碰撞。
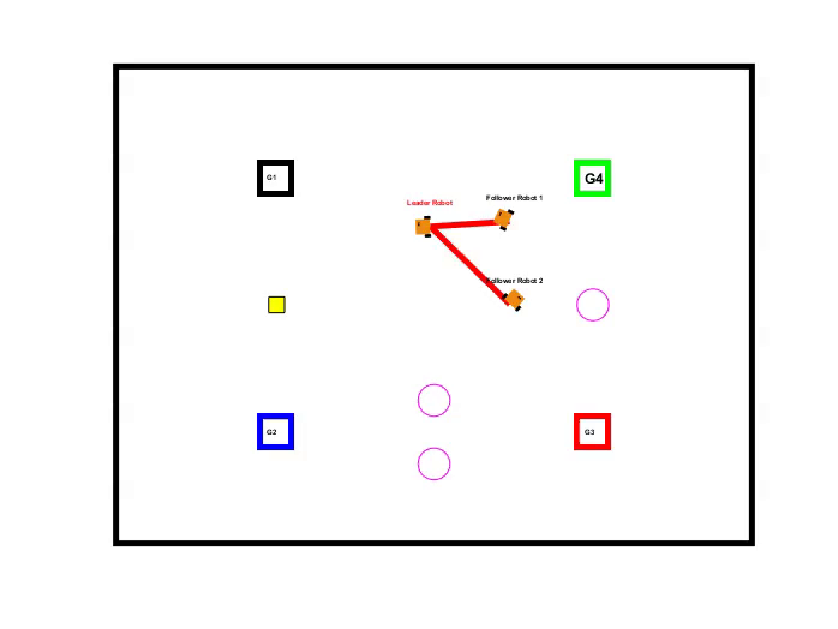
5、队形切换
若实现了当前所需要形成的队形,并且智能体的位置误差在一定范围内,则切换到下一队形。
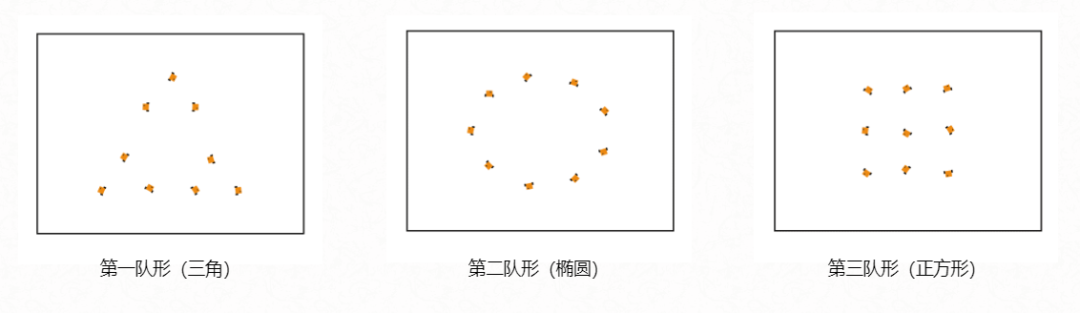
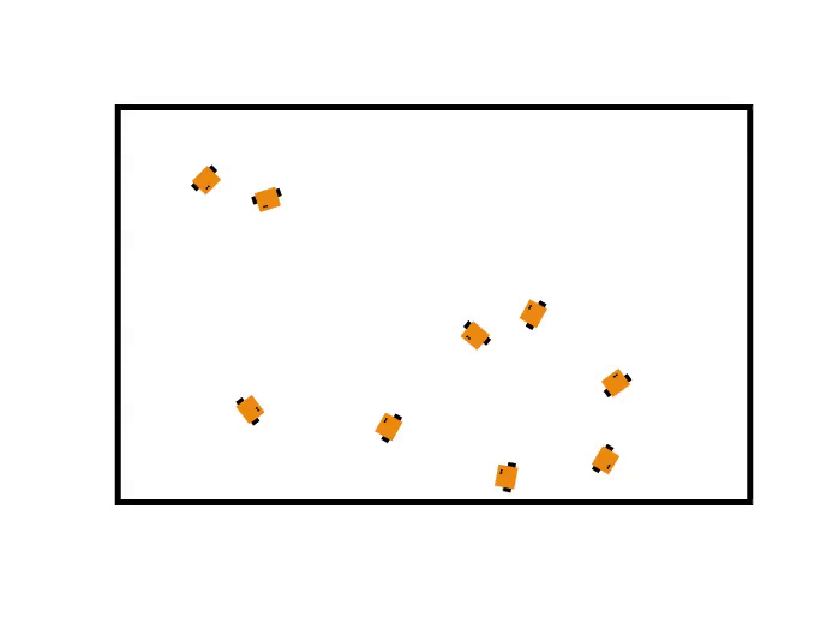
多智能体队形切换仿真
6、避障算法(人工势场法)
人工势场法(Artificial Potential Field)简称 APF,属于局部路径规划中常使用的一种方法。将传统力学中“场”的概念引入该方法,假设让智能体在这种虚拟力场下进行运动。如何设计引力场影响着该算法的性能,同时存在容易陷入局部极小点的局限性。
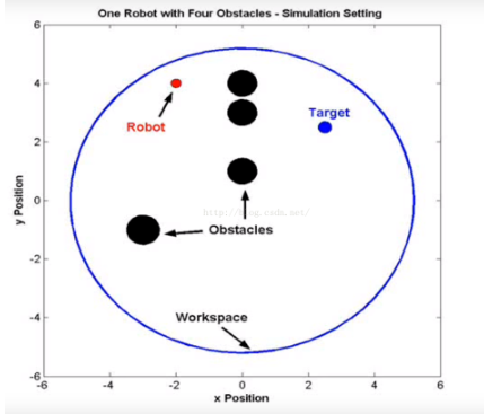
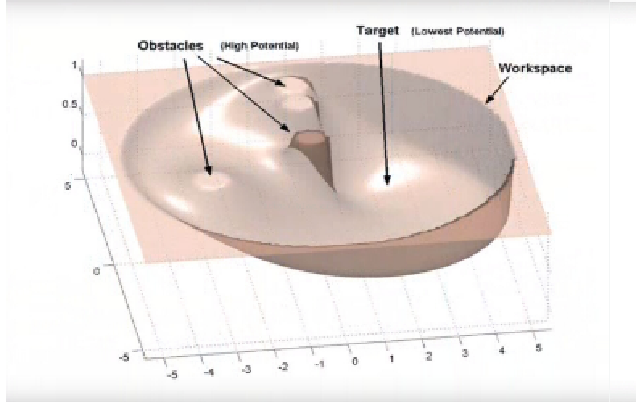
多智能体静态障碍物避障算法仿真
多智能体动态障碍物避障算法仿真
优势:原理简单、实时性强。
构建一套前沿技术和应用前景广泛的多智能体协同控制仿真实验平台,对无人工具的编队控制、一致性控制、聚散控制等多智能体协同控制算法进行验证,促进理论研究,加强理论与实际的联系,加快开发周期、降低实验成本,支撑研究团队持续发展是非常重要的。
PART 03 中科深谷多智能体的优势与特点
支持教科研方向及设备先进性中科深谷自主研发的多智能体协同控制实验平台由实时定位系统、实时控制系统、无人运动平台以及与之配套的无线网络通信装置组成,该平台可以为高校实验室或科研机构提供同构和异构智能体的控制算法验证,为理论成果提供实验支撑。
01 软件先进性
多智能体集群协同研发平台的设计过程基本符合基于模型设计(Model Based Design, MBD)流程规范。MBD是一种产品开发流程,它的核心思想是基于数学模型来模拟实际系统中的被控对象、执行机构等单元,在此基础上完成各模块核心算法功能的测试与验证,在产品设计的早期进行错误排查与代码优化,从而达到节约开发成本、缩短产品研制周期的目的。
多智能体研究平台开放性高,接口丰富。可以很方便地进行二次开发。还可根据用户的实际需求定制整个系统平台,并提供相应的技术支撑和详细的例程和说明书指导。满足用户的个性化和差异化需求,使平台更加契合用户的使用特点和习惯,提升体验感和交互率,减少用户熟悉平台的时间成本,大大提高用户的开发效率和体验。
02 硬件先进性
使用ARM控制平台,适用范围广,运行Ubuntu18.04、ROS1系统,使用多种类型总线通信方式和驱动器通信,完成从指令下发到里程反馈的闭环控制效果。设备均采用成熟的工业伺服驱动器,宽电压输入,可支持大电流高功率的电机。保护措施有编码器连接错误、过电压、过电流等。该驱动器的峰值电流可以达到额定电流的三倍以上,具有高动态性能,大的峰值转矩,低速运行平滑,抗干扰能力强,采用CAN、RS485接口实现对驱动器的控制。支持多种类的通信及传感器设备,可以实现快速组网和远程控制。
03 算法先进性
基于领航-跟随法实现多智能体的编队控制,并且经过实验表明,具有较好的协同性能和抗干扰能力。通信拓扑算法的实现。基于人工势场的编队避障算法。
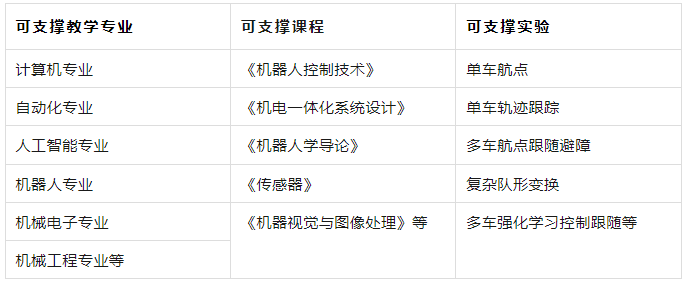
支持教科研方向
PART 04 基于中科深谷硬件平台

1、开源小蚂蚁移动机器人
开源小蚂蚁移动机器人平台是适用于移动机器人单体和多智能体控制,集环境感知、动态决策与规划、行为控制与执行等多功能于一体的高性能教科研平台。其由机器人控制系统、机电控制系统、多传感器模块及移动底盘组成。
2 、开源麦轮智能移动机器人
开源麦轮智能移动机器人平台由机器人控制系统、机电控制系统、多传感器模块及基于麦轮移动底盘组成。其中,机器人控制系统硬件基于英伟达控制器开发、软件基于 ROS 系统及 MATLAB/Simulink 开发;机电控制系统硬件基于 STM32 开发、软件基于 C 语言开发;多传感器模块硬件含有 2D 激光雷达、深度相机、IMU 模块,软件含有多传感器信息融合算法包、导航定位算法包、机器视觉算法包;移动底盘轮系结构采用麦克纳姆轮,可实现前、后、左、右、斜行、旋转等全向移动。
3、开源多传感器融合移动机器人
开源多传感器融合移动机器人平台是由移动底盘本体、控制系统、传感器系统等组成。底盛内置 ROS 和 MATLAB/Simulink 搭建的控制框架,采用差速控制模型,由基于 DSP 系列芯片自主开发的电机驱动器及轮毂电机作为动力来源。底盘本体安装有防碰撞传感器、20 激光雷达、九轴姿态传感器、深度相机。
4、开源四轮差速智能移动机器人
开源四轮差速智能移动机器人采用驱控一体化底盘平台,配合导航系统,外扩设备,构成智能移动 应用实验平台。车体系统由平台控制系统、动力控制系统、电源管理系统组成。采用 ROS 系统配合开源 SLAM 算法,完成室内建图、定位、自动避障、路径规划;通过内部的 5G 通信模块、搭配北斗定位系统,可满足室外无人化作业的需求。
5、四轮驱动四轮转向移动机器人
四轮驱动四轮转向移动机器人,底盘结构小巧,内部空间大,载重能力强,转向灵活,能实现原地转弯、任意方向的楔形行驶、极小转弯半径的阿克曼转向;带悬架的设计,能适应更多的路面;采用四驱的设计,动力和越野能力强;四轮独立转向的设计,运动灵活,轨迹跟踪精度高,可扩展机械臂形成移动机械臂产品,也可以支持ROS、导航、视觉、北斗、5G系统进行二次开发应用。
6、四足机器人
四足机器人是一款轻量型、高动态性能的四足机器人,具备步态规划、腿足控制、环境感知方面的先进技术,该产品提供丰富的二次开发接口(USB、Ethercat、串口、CAN等)。
PART 05 中科深谷多智能体MATLAB仿真与实验展示
1、多智能体MATLAB仿真

目前,国内外关于多智能体协同控制平台编队的研究大多数还停留在理论和计算机仿真层面。中科深谷以先进的科研设备(CSPACE实时仿真控制系统)和算法控制为核心技术,为高校建立该协同控制平台旨在设计一套实用可行、可靠性强的多智能体协同控制实验平台,供高校实验室用于同构和异构智能体的控制算法验证,为理论成果提供实验支撑,同时平台开源性强,预留有丰富的二次开发接口,可成为高校理论课程的实践基础。
中科深谷长期扎根于产业,聚焦机器人核心器件研发与产业化,同时立足教育、深化产教融合,致力于创新探索新技术与新工科产业人才培养融合和内在机理。为高校提供教学实训装备、实验室建设、产学研合作、师资培训、专业建设、课程资源开发、创新创业等一体化服务。未来,中科深谷将持续研发创新,将工业等产业装备设备的硬件、软件、算法等开源开放出来,努力推动教育与产业的融合发展!


