
激光SLAM和定位模块
发布日期:2023-09-06 浏览次数:4875
产品概述
激光SLAM和定位模块由激光雷达传感器、硬件算力平台和软件系统等组成,可实现构建与环境特征一致的高精度地图和实时输出机器人位姿信息的功能,且支持融合轮式里程计、IMU 和差分GPS 等信息。激光雷达传感器可选择 2D 激光雷达或 3D 激光雷达。硬件算力平台基于英特尔/英伟达工控机开发。软件系统基于 ROS 开发,可运行于 Ubuntu16.04 及以上环境。

产品特点
1. 拥有高精度激光里程计前端系统和鲁棒闭环检测及图优化后端功能。
2. 支持多传感器信息融合功能,保证产品的鲁棒性和可靠性,满足复杂场景下的建图和定位功能需求。
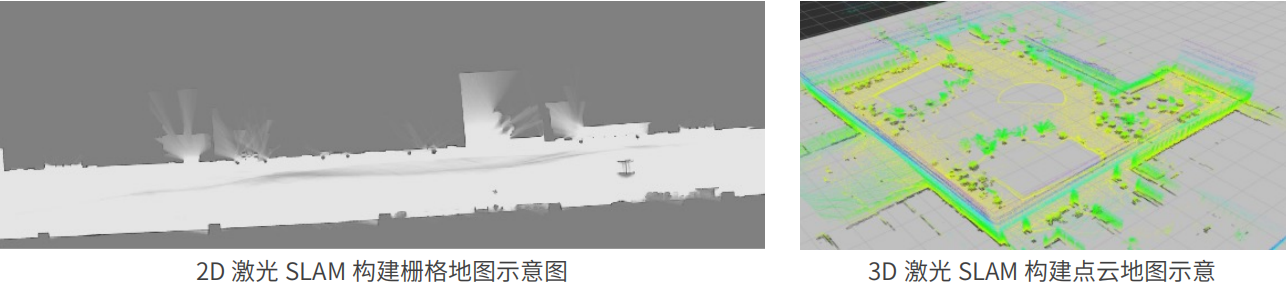
3. 支持搭配 2D/3D 激光雷达传感器,满足室内外多场景下的激光 SLAM 和定位功能需求。
4. 基于 ROS 系统下标准的传感器信息数据输入接口,方便支持教学科研需求。
应用案例
支撑科研方向
1. 激光 SLAM 高精度前端里程计功能设计研究。
2. 激光 SLAM 闭环检测功能设计研究。
3. 激光 SLAM 后端图优化功能设计研究。
4. 多传感器融合策略设计研究。
5. 扩展卡尔曼滤波位姿迭代功能设计研究。
支持实验内容

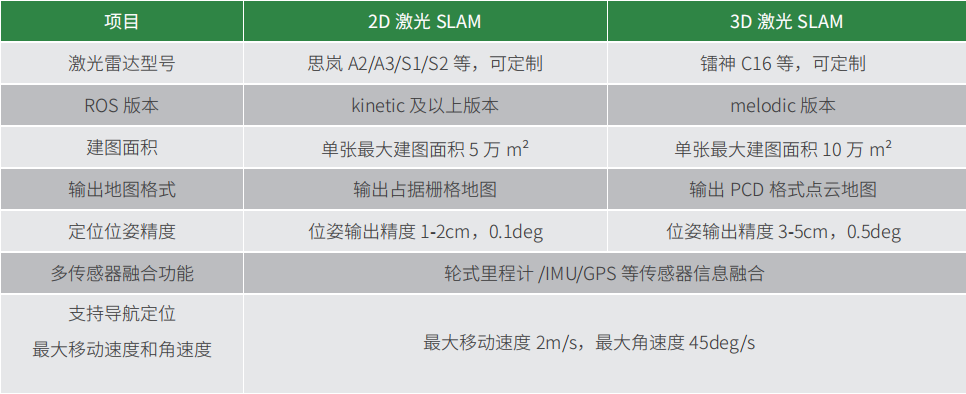
参数指标
- 上一篇:开源视觉 SLAM 定位导航模块
- 下一篇:四轮驱动四轮转向移动机器人


